Terrace Farming Robot
Aim -
To design and fabricate a robot capable of autonomously performing operations such as harvesting, seeding and plowing on a terrace (a.k.a step) farm. My responsibility in the team was to build the harvester mechanism. This project was undertaken as part of the Inter-IIT Tech Meet held at IIT Roorkee in December 2020. Having gained valuable experience working at Team Anveshak, this project allowed me to exercise all those skills to create a tangible outcome in a short time frame
Summary -
Terrace farming is one of the most efficient methods for farming in hilly areas. However, unlike most farming methods, minimal technology is currently utilised in this practice. Farmers primarily depend on human labour which limits its efficiency. Inherently, terraces cause a problem with automation due to the steep slope of the terrace and narrow terrace width. Using machinery is difficult due to limited turning radius and difficult traversal. Moving traditional machinery across the slope also increases labour costs. It is also important to note that terraces are generally located in remote areas which limits availability of maintenance and repair facilities for machines.
As suggested by the competition's given problem statement, the proposed solution is an autonomous agricultural robot capable of ploughing, seeding, watering and harvesting. Additionally, the bot must be able to climb up and down the terraces to perform the above mentioned operations individually. Special emphasis has been made on keeping all the sub-systems modular so that they can be used independently according to seasonal and crop requirements. Considering that wheat is a popular choice of crop in terrace farming, the robot has been designed taking wheat into consideration. It should be noted that although each crop has its own peculiarities, several cereal crops have a similar process of cultivation. This implies that the robot design can be suitably changed depending on the crop.
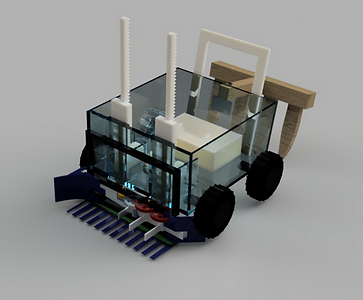
Fig 1a: The 3D model of the proposed terrace farming robot

Fig 1b: The fabricated model
The proposed robot ploughs the soil, drops the seeds in the furrows simultaneously and then waters. It then self-aligns to move along the step wall. After performing the tasks on one side of the step, it uses end detection and turns to perform the same tasks on the other side of the step and reaches the initial position. The seeding and ploughing sub-modules are now removed and the watering valve is closed. After this, the robot aligns itself to climb down the step. The harvesting sub-module is now attached and the bot traverses in a similar manner as described above, harvesting the crops. It then takes a turn and climbs to the step above the current one.
This model was presented at the Inter-IIT Tech Meet 8.0 held at IIT Roorkee in December 2020. (The Inter-IIT Tech Meet is a competitive platform where students from all the Indian Institutes of Technologies (IITs) take part in competitions and exhibitions.) The prototype was well-received and won the silver medal.
What I learnt -
-
Experience the complete design to manufacture workflow constrained with strict deadlines
-
Presentation of the model at the Tech Meet
-
Time management in a project
Progress and Current Status -
Rough Timeline -
-
Prototype successfully fabricated and presented
-
Silver Medal at the Tech Meet
-
Work started - October 2020
-
Project completed - December 2020
-
Competition - 20th-22nd December 2020